Smart 3AS
PC-Smart 3AS Serisi Kontrolörlerin Farklı Servo Markalarına Bağlantı Şekli:
3AS serisi kontrolörler, step motor kontrolörleri olarak da bilinir ve servo kontrolörler olarak bilinen 2A, 4A ve 6A serileri gibi servolara bağlanabilir ve onları çalıştırabilir. Bu iki model arasındaki temel fark, her eksen için maksimum çıkış pals frekansı ve her eksenin kontrolöre bağlanma şeklidir. Bu iki konu da aşağıda detaylı olarak açıklanacaktır.
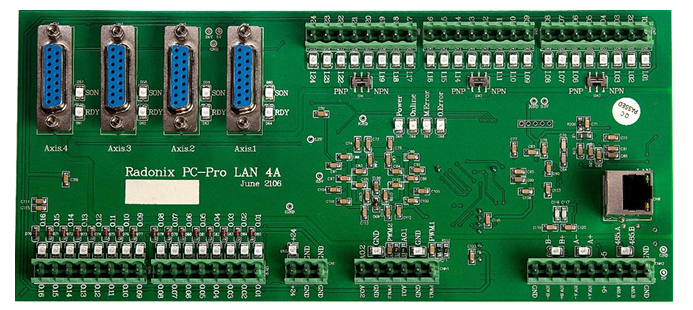
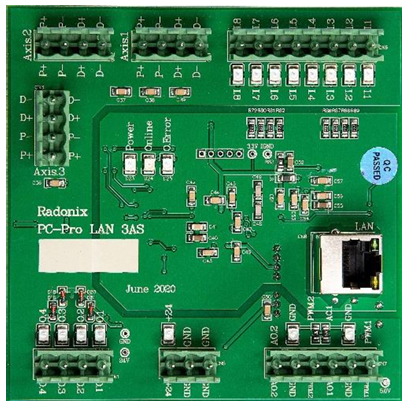
Maksimum çıkış PWM frekansı servo serisinde her eksen için 500KHz ve step serisinde 40KHz'dir. Maksimum pulse frekansının servo serisinde step serisine göre 12.5 kat fazla olduğunu göz önünde bulundurarak, step serisini servo serisi yerine kullanırken, servo sürücüdeki elektronik dişli oranının, servo kontrol kullanıldığında olan duruma göre 12.5 kat fazla olması gerektiğine dikkat edilmelidir. Örneğin, Delta marka B2 serisi 3000 rpm sunucularını kullandığımızda.
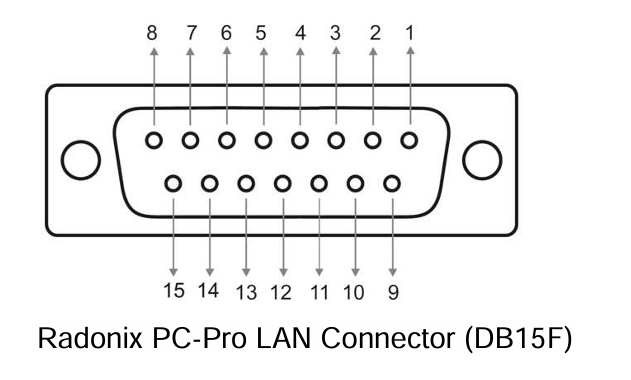
Elektronik sürücü dişli kutusu için 16 oranında bir anket serisi hesaplaması yapalım. Elektronik dişli kutusunun hesaplama yöntemi zaten açıklanmıştır. Bu arada, direksiyon kontrolörünün kullanıldığı mod için bu oran 12.5-200*16 olacaktır. Bu hesaplama yöntemi tüm servo markaları için aynıdır. Anket serisindeki eksen konnektörü, her bir pini bir sinyal göndermek veya sürücüden geri bildirim almak amacıyla kullanılan bir DB15-F konnektörüdür. Bununla birlikte, direksiyon serisinde yalnızca 4 pin Pulse ve Yön göndermek için ayrı olarak eksenlere ayrılır ve geri kalanlar ayrı olarak güç kaynağına, kontrol cihazının giriş veya çıkışlarına bağlanmalıdır. Aşağıda, servo serisindeki her pinin açıklaması ve Styria serisinde nasıl değiştirileceği verilmiştir, böylece her bir servo sürücü markası ile Radonix servo serisi kontrol cihazı arasındaki iletişim kitabına sahip olarak Styria serisi kontrol cihazlarını kullanabilirsiniz.
1 Pin Bu, pozitif voltaj çıkış pinidir (24V). Servo sürücülerde, dijital giriş bölümünü etkinleştirmek için genellikle COM olarak adlandırılan servo kontrol konnektörünün bir pinine harici bir pozitif voltaj bağlamak gerekir. Servo serisi kontrol cihazlarında, pin numarası 1'in bu pine bağlanması öngörülmüştür, ancak step motor kontrolörü kullanıldığında, servo kontrolörlerde pin numarası 1'e karşılık gelen pin doğrudan pozitif voltaja bağlanmalıdır.
Güç kaynağını veya +24V kontrolörünü bağlayın.
2 Pin Bu, çıkış pini - Yön'dür. Step motor kontrolörü kullanıldığında, karşılık gelen pin,
Servo kontrolörlerdeki 2 numaralı pin, istenen eksenin D pinine bağlanmalıdır.
3 Pin Bu çıkış pini + Yön'dür. Step motor kontrolörü kullanıldığında, karşılık gelen pin,
Servo kontrolörlerdeki 3 numaralı pin, istenen eksenin + D pinine bağlanmalıdır.
4 Pin Bu, çıkış pini - Darbedir. Step motor kontrolörü kullanıldığında, karşılık gelen pin,
Anket kontrolörlerindeki 4 numaralı pin, istenen P ekseni tabanına bağlanmalıdır.
5 Pin Bu pin, Pulse + çıkış pinidir. Step motor kontrolörü kullanıldığında, karşılık gelen pin,
Anket kontrolörlerindeki 5 numaralı pin, istenen eksenin + P tabanına bağlanmalıdır.
6 Pin Bu pin, Servo ON sinyalinin çıkışıdır. Step motor kontrolörü kullanıldığında, servo kontrolörlerde pin 6'ya karşılık gelen pin, kontrol cihazının dijital çıkışlarından birine (0.1'den 0.4'e kadar) bağlanmalıdır ve yazılım ayarlarında bu çıkışla ilgili bağlantı, ControlStatusPin olarak tanımlanmalıdır. Böylece servo yazılımı çevrimiçi olduğunda aktif hale gelecektir. Sürücülerin tüm Servo On pinlerini bir çıkışa bağlayın. Servo On pinini atlayarak doğrudan GND'ye bağlayabileceğinizi veya sürücü parametrelerini değiştirerek Servo ON moduna alabileceğinizi unutmayın, böylece çıkışlardan birini işgal etmeye gerek kalmaz.
7 Pin Bu pin, Servo Ready sinyal giriş pinidir. Çoğu servo sürücüde, dijital çıkış pinleri bir çift olarak düşünülür - DO ve + DO. Servo kılavuzuna göre, DO pini GND'ye ve + DO pini Radonix kontrol cihazının girişine bağlanmalıdır. Anket serisinde 7 numaralı pine ve step motor serisinde ise dijital girişlerden birine bağlanmalıdır. Bu nedenle, step motor kontrolörü kullanıldığında, anket kontrolörlerinde pin 7'ye karşılık gelen pin dijital girişlerden birine (1.1'den 1.8'e kadar) bağlanmalıdır ve yazılım ayarlarında bu girişle ilgili bağlantıyı Emergency olarak tanımlarız ve NC=True olarak ayarlarız. Ayrıca, Emergency girişini, Axis X Alarm'dan ayırmak için bağlantıyı Emergency olarak tanımlayabilirsiniz. (Aslında, işaretinden sonra yazılan açıklama etkinleştirildiğinde, Emergency girişi yazılımın altında görüntülenecektir.) Eğer kontrol cihazının dijital girişlerinin sayısında bir sınırlama varsa, tüm Servo Ready sinyallerini aşağıdaki gibi seri olarak bağlayabilirsiniz, böylece kontrol cihazı yalnızca bir dijital giriş kullanır.

Servo Ready tabanlarının kablolamasının her birinde bir hata durumunda sistem sürücülerinin durdurulmasını, çeşitli risklerin önlenmesini veya cihaz, araç veya iş parçasının zarar görmesini sağlamak için yapılması gerektiğine dikkat edin.
8 Pin: Bu pin, Encode Zero sinyal girişine karşılık gelir ve bağlanması gerekmez; bu pin kullanılabilir.
9 Pin: Bu pin, Clear Alarm sinyalinin çıkışıdır. Step motor kontrolörü kullanıldığında, anket kontrolörlerindeki pin 9'a karşılık gelen pin, kontrol cihazının dijital çıkışlarından birine (0.1'den 0.4'e kadar) bağlanmalıdır ve yazılım ayarlarında bu çıkışla ilgili bağlantı ClearAlarmPin olarak tanımlanmalıdır. Ayrıca, yazılım düzenleme ortamını kullanarak yazılım sayfasına bir buton ekleyin ve bağlantısını ClearAlarm olarak tanımlayın, böylece bu tuşa basarak sürücülerde gösterilen alarm, eğer sorun çözülmüşse, sürücülerin tüm Reset Alarm pinlerini temizleyecektir. Clear Alarm tabanı da göz ardı edilebilir ve sürücülerdeki alarmları temizlemek için cihazı kapatıp tekrar açabilirsiniz.
10-15 Pin: Bu 6 pin, çoğu CW iki girişli servo sürücüde negatif voltaj çıkışlarıdır (GND). Limit ve CCW Limit ve bazı sürücülerde Emergency girişi bulunur. Bu girişlerin hepsi normalde kapalıdır (Normally Close) ve bu girişler boş bırakıldığında, sürücü alarm modunda olacaktır. Step motor kontrolörü kullanıldığında, bu üç giriş aşağıdaki üç yoldan biriyle yönetilebilir:
- Bu üç girişi boş bırakın ve durumlarını Normally Open olarak değiştirin veya bu üç girişi tamamen devre dışı bırakın ya da silin.
- Tüm bu üç girişi negatif voltaj veya GND'ye bağlayarak alarmları ortadan kaldırın.
- Her girişi ilgili sensöre, mikroswitch'e veya fiziksel anahtara bağlayın.
Ayrıca, Servo Ready ile ilgili DO pinine bağlanmak için bu GND pinlerinden biri kullanılabilir. Step motor kontrolörü kullanıldığında nasıl bağlanacağını 7 Pin bölümünde açıkladım.
Yukarıdaki maddeler aşağıdaki tabloda özetlenmiştir :
| sayı | Description | PC-Pro LAN 3AS |
|---|---|---|
| 1 | VCC +24 V | + 24 V |
| 2 | Direction - | D - |
| 3 | Direction + | D + |
| 4 | Pulse - | P - |
| 5 | Pulse + | P + |
| 6 | Servo On | O.1 – O.4 (ControlStatusPin,1) |
| 7 | Ready | I.1 – I.8 (Emergency) |
| 8 | Encoder Zero | Not Connected |
| 9 | Alarm Reset | O.1 – O.4 (ClearAlarmPin) |
| 10 | Ground | GND |
| 11 | Ground | GND |
| 12 | Ground | GND |
| 13 | Ground | GND |
| 14 | Ground | GND |
| 15 | Ground | GND |
Örneğin, yukarıdaki tablo Delta B2 serisi sürücü için aşağıdaki gibi olacaktır
| PC-Pro LAN 3AS | Description | ASDA-B2 Pin |
|---|---|---|
+ 24 V | VCC +24 V | 11 |
| D - | Direction - | 37 |
| D + | Direction + | 39 |
| P - | Pulse - | 41 |
| P + | Pulse + | 43 |
| O.1 – O.4 (ControlStatusPin,1) | Servo On | 9 |
| I.1 – I.8 (Emergency) | (DO+) Ready | 7 |
| Not Connected | Encoder Zero | 44 |
| O.1 – O.4 (ClearAlarmPin) | Alarm Reset | 33 |
| GND | CW Limit | 32 |
| GND | CCW Limit | 31 |
| GND | Emergency | 30 |
| GND | (DO-) Ready | 6 |
Updated over 1 year ago